IsaacSim Setup

Prerequisite
Official GeForce Drivers NVIDIA
ubuntu22.04安装nvidia驱动/CUDA/cudnn_
Cuda安装相关
Nvidia Driver
#卸载nvidia driver sudo apt-get --purge remove "*nvidia*" sudo apt autoremove #安装指定版本driver sudo add-apt-repository ppa:graphics-drivers/ppa # 加入官方ppa源 sudo apt update # 检查软件包更新列表 apt list --upgradable # 查看可更新的软件包列表 sudo apt upgrade # 更新所有可更新的软件包 #下载driver ubuntu-drivers devices # ubuntu检测n卡的可选驱动 sudo apt install nvidia-driver-5xx # 根据自己的n卡可选驱动下载显卡驱动下载cuda
#下载链接https://developer.nvidia.com/cuda-toolkit-archive切换cuda版本:
#查看已安装的cuda ls -l /usr/local | grep cuda #打开环境变量 vim ~/.bashrc #按i进入编辑模式,粘贴下方命令。Esc,输入:wq保存并退出 export PATH=/usr/local/cuda-12.6/bin:$PATH export LD_LIBRARY_PATH=/usr/local/cuda-12.6/lib64:$LD_LIBRARY_PATH export LIBRARY_PATH=/usr/local/cuda-12.6/lib64:$LIBRARY_PATH #保存环境变量 source ~/.bashrccuda卸载:
cd /usr/local/cuda-xx.x/bin/ sudo ./cuda-uninstaller sudo rm -rf /usr/local/cuda-xx.x
Docker 配置:
Container Installation — Isaac Sim Documentation
Docker卸载
sudo systemctl stop docker sudo apt-get purge docker-ce docker-ce-cli containerd.io sudo rm -rf /var/lib/docker sudo rm -rf /etc/docker sudo rm -rf /var/run/docker.sock sudo groupdel dockerDocker 下载:
curl -fsSL https://get.docker.com -o get-docker.sh sudo sh get-docker.sh sudo groupadd docker sudo usermod -aG docker $USER newgrp docker #设置开机自启动docker systemctl enable docker sudo systemctl restart docker #验证docker docker run hello-world #查看docker里面安装的镜像文件 docker images下载NVIDIA Container Toolkit:
curl -fsSL https://nvidia.github.io/libnvidia-container/gpgkey | sudo gpg --dearmor -o /usr/share/keyrings/nvidia-container-toolkit-keyring.gpg \ && curl -s -L https://nvidia.github.io/libnvidia-container/stable/deb/nvidia-container-toolkit.list | \ sed 's#deb https://#deb [signed-by=/usr/share/keyrings/nvidia-container-toolkit-keyring.gpg] https://#g' | \ sudo tee /etc/apt/sources.list.d/nvidia-container-toolkit.list \ && \ sudo apt-get update #Install the NVIDIA Container Toolkit packages sudo apt-get install -y nvidia-container-toolkit sudo systemctl restart docker #Configure the container runtime sudo nvidia-ctk runtime configure --runtime=docker sudo systemctl restart docker #查看nvidia-smi docker run --rm --runtime=nvidia --gpus all ubuntu nvidia-smi docker run --rm -it --gpus all ubuntu:22.04 /bin/bash #启动docker里面的cuda时,需要对应好本机的ubuntu版本 #查看对应版本如下:https://gitlab.com/nvidia/container-images/cuda/blob/master/doc/supported-tags.md
Docker + Nvidia container toolkit: 使用 NVIDIA Container Toolkit 和 Docker 配置 GPU 深度学习环境 - 溺死在幸福里的猪 - 博客园
[Ubuntu22.04安装docker、nvidia-docker、NVIDIA Container Toolkit亲自安装必有效_ubuntu22.04安装nvidia-docker-CSDN博 客](https://blog.csdn.net/guoqingru0311/article/details/145926492)问题解决记录1:nvidia-container-cli: initialization error: load library failed
一些package可以从https://hub.docker.com/search进行pull
Isaac Ros Workspace Setup
Restart docker
sudo systemctl daemon-reload && sudo systemctl restart dockerInstall Git LFS
sudo apt-get install git-lfs git lfs install --skip-repoCreate ROS2 Workspace
mkdir -p ~/workspaces/isaac_ros-dev/src echo "export ISAAC_ROS_WS=${HOME}/workspaces/isaac_ros-dev/" >> ~/.bashrc source ~/.bashrcCreate isaac_ros_common
cd ${ISAAC_ROS_WS}/src && \ git clone -b release-3.2 https://github.com/NVIDIA-ISAAC-ROS/isaac_ros_common.git isaac_ros_commonQuick start assets
sudo apt-get install -y curl jq tar NGC_ORG="nvidia" NGC_TEAM="isaac" PACKAGE_NAME="isaac_ros_visual_slam" NGC_RESOURCE="isaac_ros_visual_slam_assets" NGC_FILENAME="quickstart.tar.gz" MAJOR_VERSION=3 MINOR_VERSION=1 VERSION_REQ_URL="https://catalog.ngc.nvidia.com/api/resources/versions?orgName=$NGC_ORG&teamName=$NGC_TEAM&name=$NGC_RESOURCE&isPublic=true&pageNumber=0&pageSize=100&sortOrder=CREATED_DATE_DESC" AVAILABLE_VERSIONS=$(curl -s \ -H "Accept: application/json" "$VERSION_REQ_URL") LATEST_VERSION_ID=$(echo $AVAILABLE_VERSIONS | jq -r " .recipeVersions[] | .versionId as \$v | \$v | select(test(\"^\\\\d+\\\\.\\\\d+\\\\.\\\\d+$\")) | split(\".\") | {major: .[0]|tonumber, minor: .[1]|tonumber, patch: .[2]|tonumber} | select(.major == $MAJOR_VERSION and .minor <= $MINOR_VERSION) | \$v " | sort -V | tail -n 1 ) if [ -z "$LATEST_VERSION_ID" ]; then echo "No corresponding version found for Isaac ROS $MAJOR_VERSION.$MINOR_VERSION" echo "Found versions:" echo $AVAILABLE_VERSIONS | jq -r '.recipeVersions[].versionId' else mkdir -p ${ISAAC_ROS_WS}/isaac_ros_assets && \ FILE_REQ_URL="https://api.ngc.nvidia.com/v2/resources/$NGC_ORG/$NGC_TEAM/$NGC_RESOURCE/\ versions/$LATEST_VERSION_ID/files/$NGC_FILENAME" && \ curl -LO --request GET "${FILE_REQ_URL}" && \ tar -xf ${NGC_FILENAME} -C ${ISAAC_ROS_WS}/isaac_ros_assets && \ rm ${NGC_FILENAME} fi
Isaac Sim
Installization(Workstation)
- Download
Download Isaac Sim — Isaac Sim Documentation
Workstation Installiation
mkdir ~/isaacsim cd ~/Downloads cd ~/isaacsim ./post_install.sh #运行这个命令会打开app selector,可以选择内置ros环境和ros bridge ./isaac-sim.selector.sh #运行这个命令会直接唤起程序 ./isaac-sim.shROS2 Installization
本地下载:ROS2 humble
注意source ros2空间!!
source /opt/ros/humble/setup.bash
ROS bridge extnesion
Window->Extensions and search for ROS 2 bridge
Set up Isaac Sim ROS Workspaces
下载ws:isaac-sim/IsaacSim-ros_workspaces: Isaac Sim ROS Workspaces
下载相关包:
# For rosdep install command sudo apt install python3-rosdep python3-rosinstall python3-rosinstall-generator python3-wstool build-essential # For colcon build command sudo apt install python3-colcon-common-extensions cd humble_ws rosdep install -i --from-path src --rosdistro humble -y colcon build #每次启动isaac sim前均需要运行source source install/local_setup.bash
Nav2:
ROS2 Navigation — Isaac Sim Documentation
Installization
sudo apt install ros-<ros2-distro>-navigation2 sudo apt install ros-<ros2-distro>-nav2-bringupOccupancy Map
Running
启动流程:
#Terminal1 cd ~/isaacsim ./isaac-sim.selector.sh #Terminal2 cd ~/IsaacSim-ros_workspaces cd humble_ws source install/local_setup.bash ros2 launch carter_navigation carter_navigation.launch.pyLoad example:
Window > Examples > Robotics Examples然后打开ROS2 > Navigation > Carter
Play
Pose Estimate
Nav2 Goal
NVBlox:
首先完成前置环境配置:
isaac_ros_nvblox:
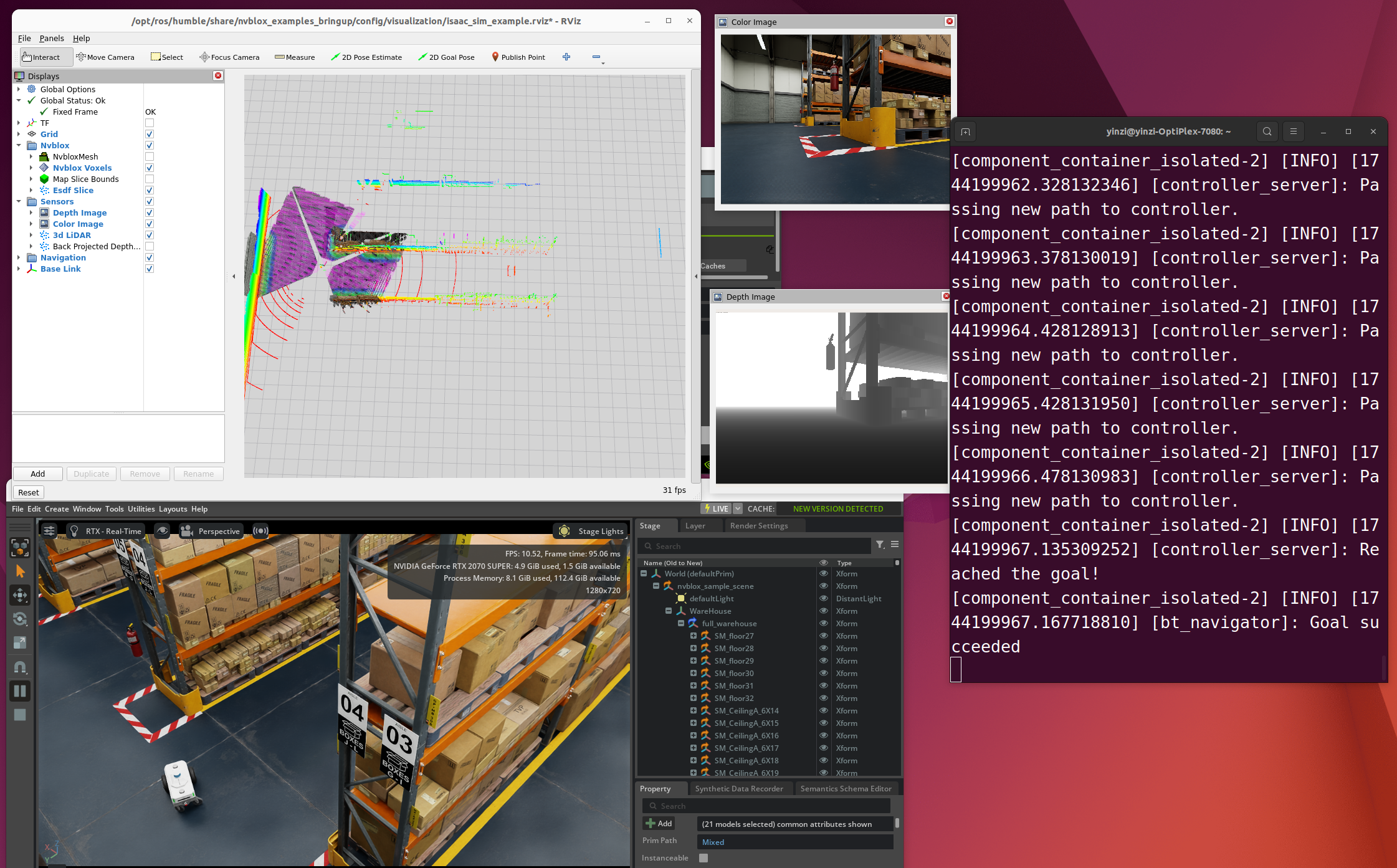
#Launch docker container cd $ISAAC_ROS_WS && ./src/isaac_ros_common/scripts/run_dev.sh #Install isaac_ros_nvblox and its dependencies.(重新启动docker时可能需要 再运行下这个进行source) sudo apt-get update sudo apt update && sudo apt-get install -y ros-humble-isaac-ros-nvblox && \ rosdep update && \ rosdep install isaac_ros_nvbloxros2 launch nvblox_examples_bringup isaac_sim_example.launch.py \ rosbag:=${ISAAC_ROS_WS}/isaac_ros_assets/isaac_ros_nvblox/quickstart \ navigation:=FalseReconstruction + Nav2
跑launch之前的source应该运行这个: IsaacSim 4.5 Workstation - Nav2/VSlam
cd $ISAAC_ROS_WS && ./src/isaac_ros_common/scripts/run_dev.sh cd /workspaces/isaac_ros-dev export FASTRTPS_DEFAULT_PROFILES_FILE=/usr/local/share/middleware_profiles/rtps_udp_profile.xml ros2 launch nvblox_examples_bringup isaac_sim_example.launch.py#建议先启动isaac-sim-selector ./isaac-sim.selector.sh #在selector gui界面内先Clear cache,然后Open in terminal ./isaac-sim.sh⚠️Crash:
点击play后会出现crash提示或者在运行一段Nav2后会出现 llvm: out of memory 此时需要对Nvidia Driver版本进行降级,根据官方推荐为 >= **535.129.03** 如果运行时再出现crash,保留nvblox终端,再次运行isaacsim⚠️Error:
[Error] [omni.sensors.nv.lidar.lidar_core.plugin] CUDA Driver CALL FAILED at line 522: the provided PTX was compiled with an unsupported toolchain. [Error] [omni.sensors.nv.lidar.lidar_core.plugin] CUDA Driver CALL FAILED at line 548: named symbol not found #</path/to/isaac_sim_installation>为isaacsim文件的下载路径 export LD_LIBRARY_PATH=</path/to/isaac_sim_installation>/extscache/omni.sensors.nv.common-2.5.0-coreapi+lx64.r.cp310/bin:$LD_LIBRARY_PATHRVIZ2: 选中3d LiDAR可以感知较大范围的物体,可以辅助Nav时Goal的选择
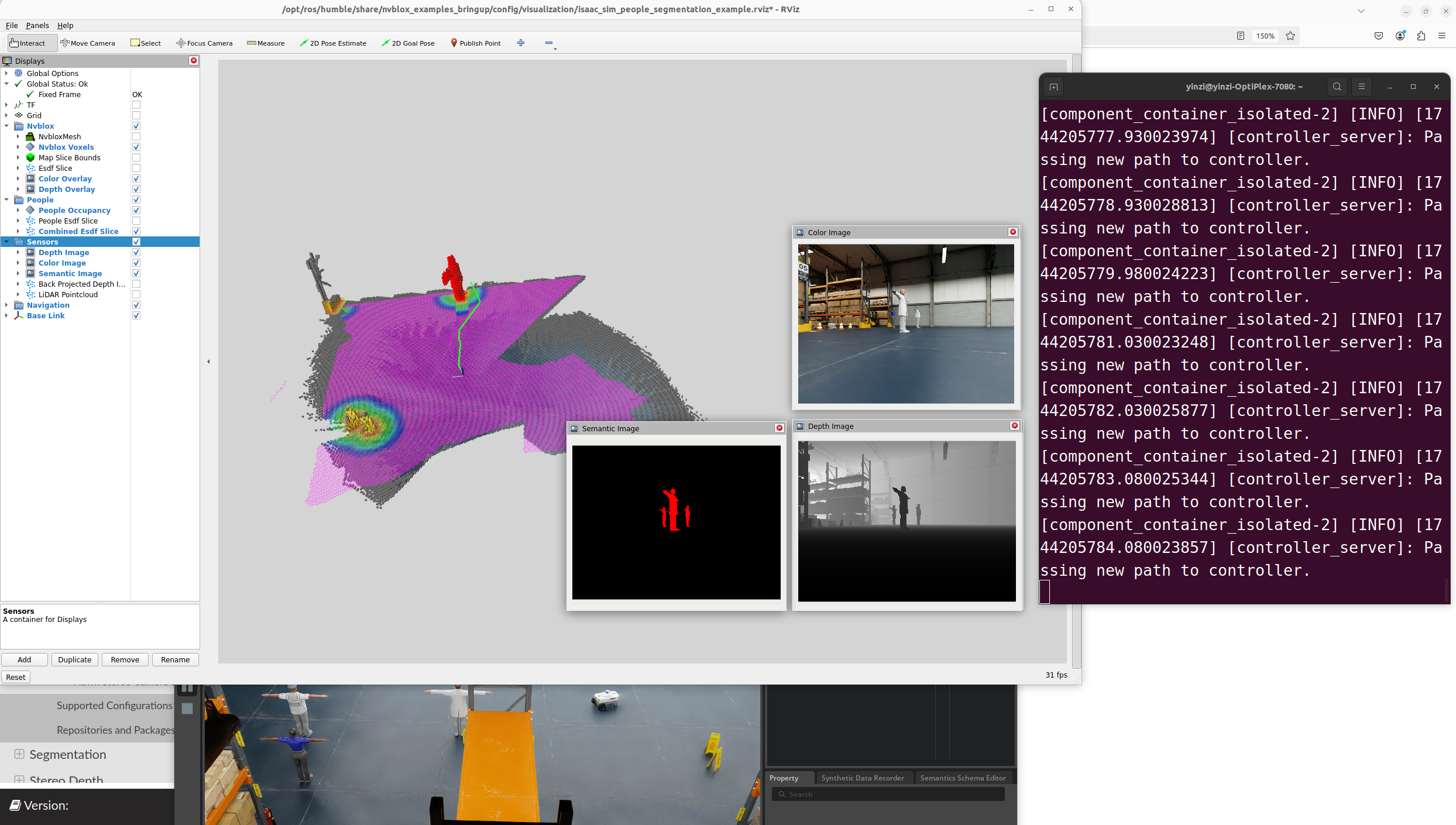
- Reconstruction + Segmantic image
Visual Slam
首先完成前置环境配置:
isaac_ros_visual_slam 环境配置
cd ${ISAAC_ROS_WS}/src/isaac_ros_common && \ ./scripts/run_dev.sh sudo apt-get update #每次launch前要用这个source一下 sudo apt-get install -y ros-humble-isaac-ros-visual-slamRun Launch File
#Terminal 1 sudo apt-get update sudo apt-get install -y ros-humble-isaac-ros-examples #使用quickstart ros2 launch isaac_ros_examples isaac_ros_examples.launch.py launch_fragments:=visual_slam \ interface_specs_file:=${ISAAC_ROS_WS}/isaac_ros_assets/isaac_ros_visual_slam/quickstart_interface_specs.json \ rectified_images:=false#Terminal 2 cd ${ISAAC_ROS_WS}/src/isaac_ros_common && \ ./scripts/run_dev.sh #这个用来启动摄像头,在运行完Terminal3后运行 ros2 bag play ${ISAAC_ROS_WS}/isaac_ros_assets/isaac_ros_visual_slam/quickstart_bag --remap \ /front_stereo_camera/left/image_raw:=/left/image_rect \ /front_stereo_camera/left/camera_info:=/left/camera_info_rect \ /front_stereo_camera/right/image_raw:=/right/image_rect \ /front_stereo_camera/right/camera_info:=/right/camera_info_rect \ /back_stereo_camera/left/image_raw:=/rear_left/image_rect \ /back_stereo_camera/left/camera_info:=/rear_left/camera_info_rect \ /back_stereo_camera/right/image_raw:=/rear_right/image_rect \ /back_stereo_camera/right/camera_info:=/rear_right/camera_info_rect#Terminal cd ${ISAAC_ROS_WS}/src/isaac_ros_common && \ ./scripts/run_dev.sh #run rviz rviz2 -d $(ros2 pkg prefix isaac_ros_visual_slam --share)/rviz/default.cfg.rviz
