URDF
URDF: https://github.com/EmbodiedLLM/RoadRunner_Description
装配体:https://www.jianguoyun.com/p/DekYivEQ7IupDRjN9f0FIAA
Fusion 360建模
主体部分:
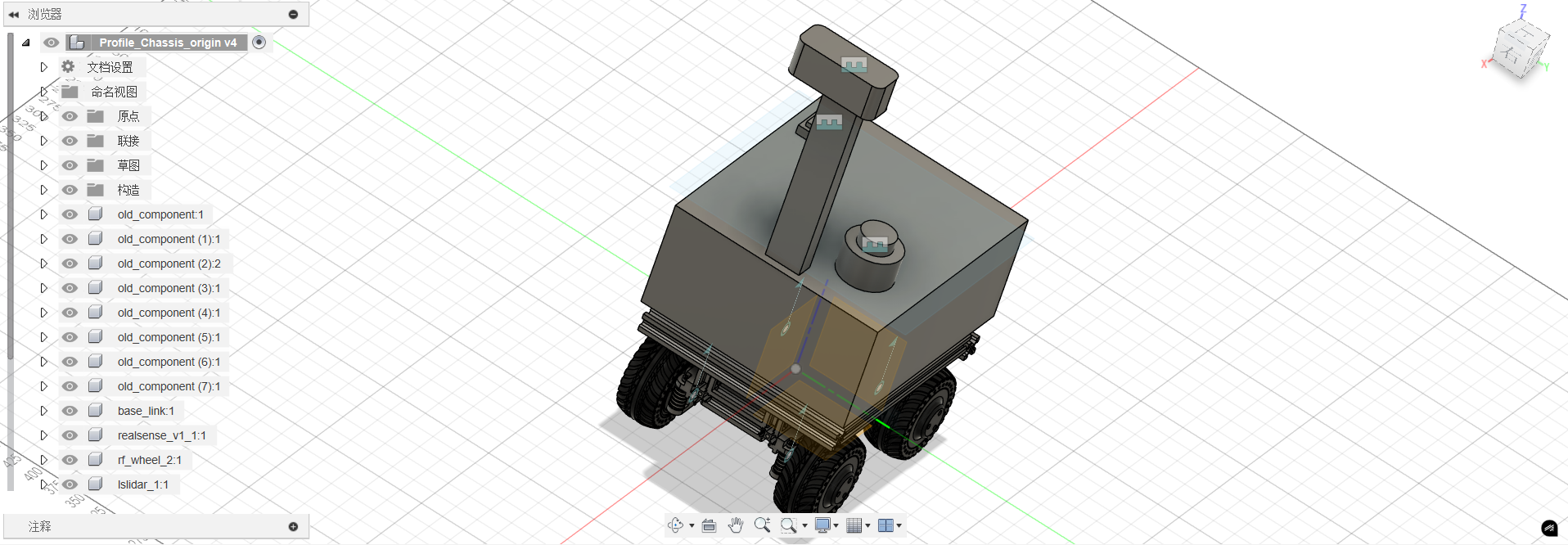
先将整个主体部分的坐标系切换到标准位置,然后要将除四个轮子、雷达、imu、realsense的其他部分全部合并一个实体(base_link)
⚠️合并实体之前要禁用”捕获历史设计”,然后将所有的零部件进行独立,否则会出现零件位置异常。
joint设定:
所有接合部分均需要设定joint,wheel的component1设定为wheel,component2设定为base_link
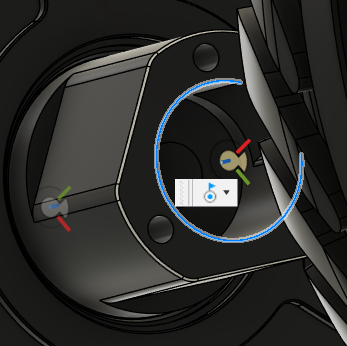
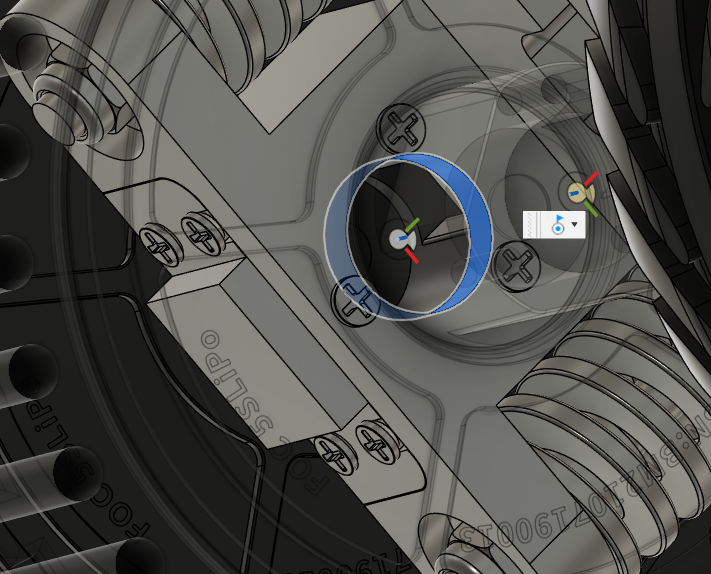
⚠️在设定轮子的joint-continuous时,可能会出现反转的情况,此时切换下component的对象,如下:
文件结构:
Fusion2urdf
教程:https://github.com/runtimerobotics/fusion360-urdf-ros2?tab=readme-ov-file#usage
下载:https://github.com/syuntoku14/fusion2urdf
脚本修改:
ModuleNotFoundError: No module named ‘distutils’ 和 FileExistsError的报错分别修改下面两行即可

from shutil import copytree
copytree(package_dir, save_dir, dirs_exist_ok=True)
导出urdf:
导出后的文件名为name_description
rviz可视化:
- 一些依赖包的下载:
# <ros2_version>为对应的ros2版本
sudo apt-get install ros-<ros2_version>-xacro
sudo apt-get install ros-<ros2_version>-joint-state-publisher*
sudo apt-get install libboost-dev
- 编译urdf文件:
mkdir ros_ws
cd ros_ws
mkdir src
#将导出的name_description文件粘贴到src目录下面
colcon build
source install/setup.bash
ros2 launch name_description display.launch.py
- 可视化:
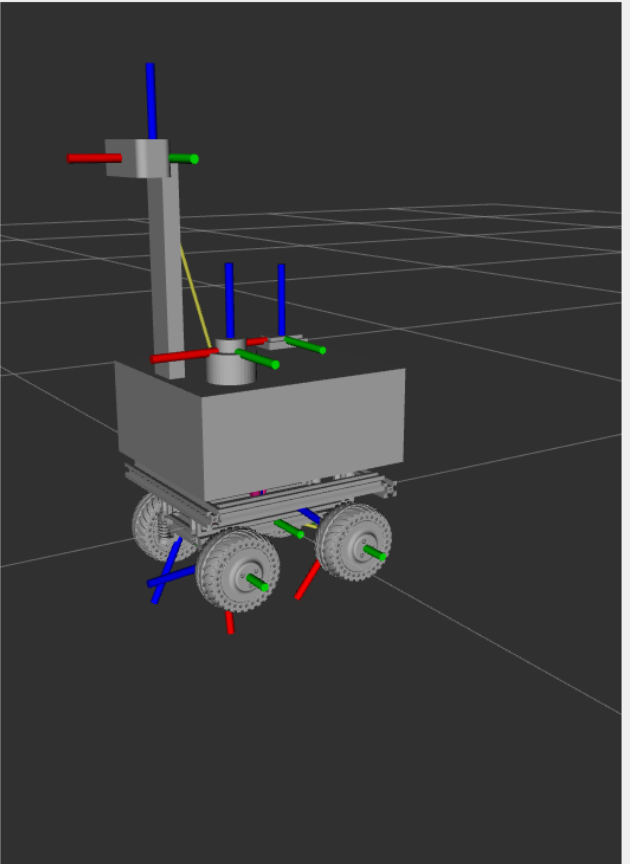
如图为可视化结果,可以看到base_link, wheel, realsense, imu, lslidar均显示一致的坐标(x轴-小车前进方向,y轴-垂直于小车侧面向左,z轴-垂直与小车所在平面向上)。
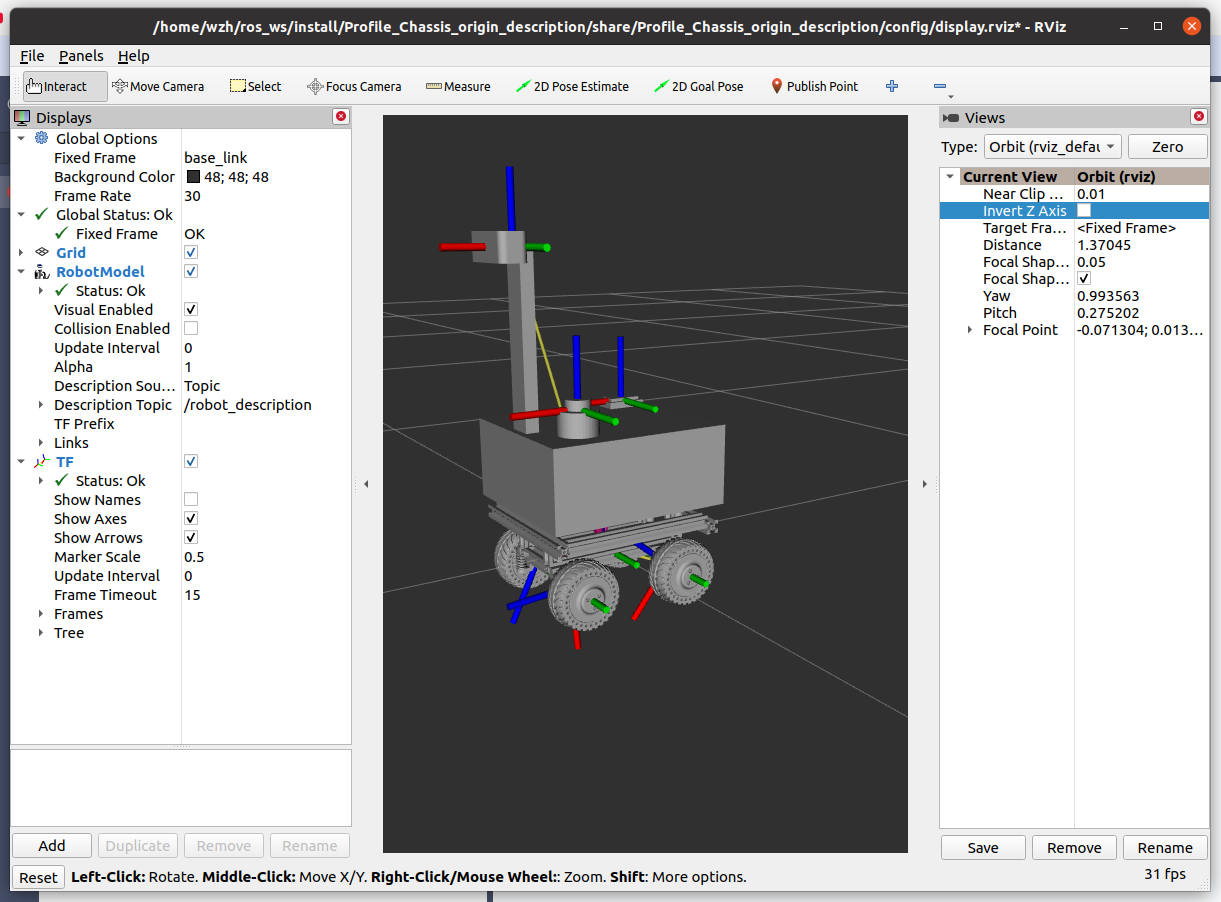
同时在joint state publisher gui可以查看四个 continuous joint的角度。
api: http://wiki.ros.org/joint_state_publisher

URDF优化:
通常我们导出的 .xacro 文件中的 link类似下面形式。其中 <visual> 标签下面的 <geometry> 代表了机器人在 rviz 和 gazebo 中的视觉外观, <collision> 标签下面的 <geometry> 则是为了计算机器人碰撞相关的属性。通常我们需要将简化机器人的碰撞属性,以加速计算。常用的方法就是用简单的几何体如 box, cylinder 等标签来代替复杂的 <mesh> 。
<link name="front_body_1">
<inertial>
<origin xyz="-6.65652102683342e-05 -0.06154373261259522 0.09779200224706583" rpy="0 0 0"/>
<mass value="32.58361663843448"/>
<inertia ixx="0.455324" iyy="0.608462" izz="0.736903" ixy="-1.7e-05" iyz="-0.005229" ixz="0.000456"/>
</inertial>
<visual>
<origin xyz="-0.0025 -0.0025 -0.001" rpy="0 0 0"/>
<geometry>
<mesh filename="file://$(find dd42s_description)/meshes/front_body_1.stl" scale="0.001 0.001 0.001"/>
</geometry>
<material name="silver"/>
</visual>
<collision>
<origin xyz="-6.65652102683342e-05 -0.07654373261259522 0.12379200224706583" rpy="0 0 0"/>
<geometry>
<!-- <mesh filename="file://$(find dd42s_description)/meshes/front_body_1.stl" scale="0.001 0.001 0.001"/> -->
<box size="0.364 0.332 0.265 "/>
</geometry>
</collision>
</link>
