URDF Repository: https://github.com/EmbodiedLLM/RoadRunner_Description
Assembly Files: https://www.jianguoyun.com/p/DekYivEQ7IupDRjN9f0FIAA
Fusion 360 Modeling
Main Body Components
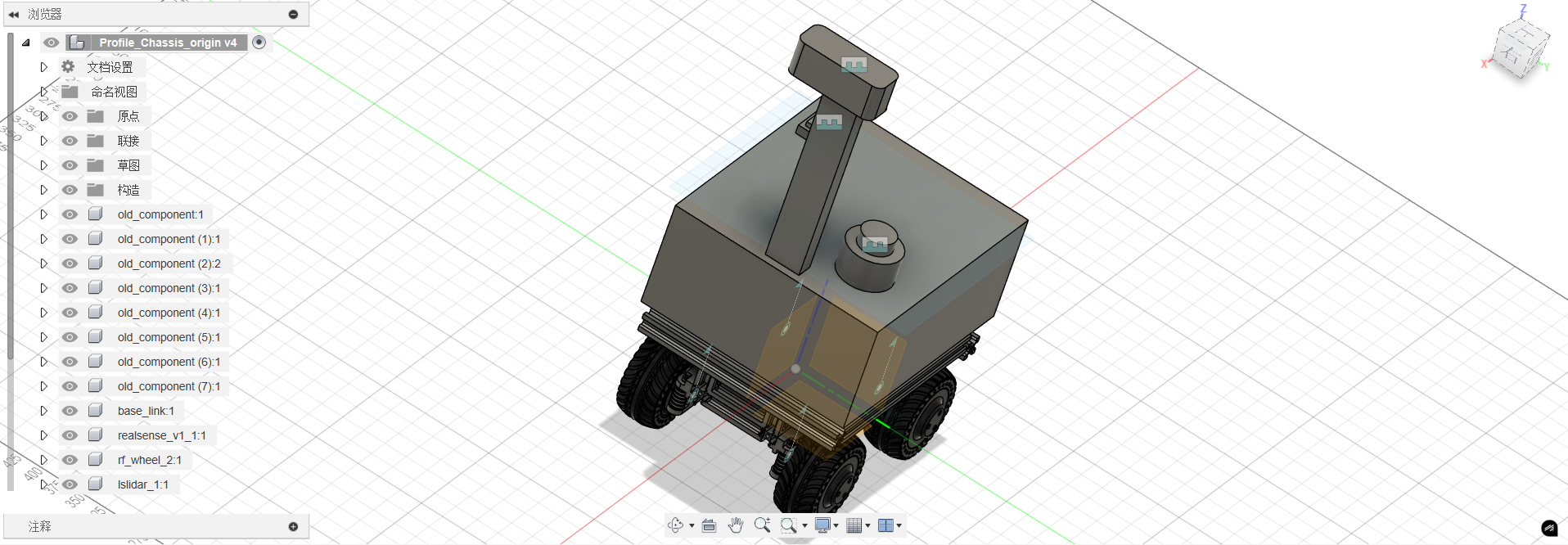
First, switch the coordinate system of the entire main body to the standard position, then merge all parts except the four wheels, radar, IMU, and RealSense into one entity (base_link).
⚠️ Before merging entities, disable "Capture Design History", then make all components independent, otherwise component position anomalies may occur.
Sometimes when two components are copied from each other, you need to right-click on one component and select "Break Link" to make it independent, otherwise one component may become missing during the merge process.
Joint Configuration
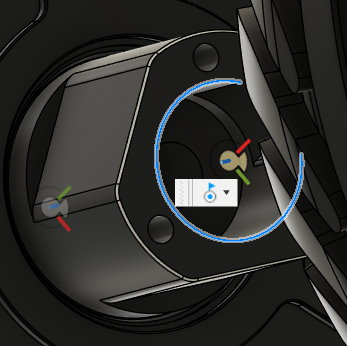
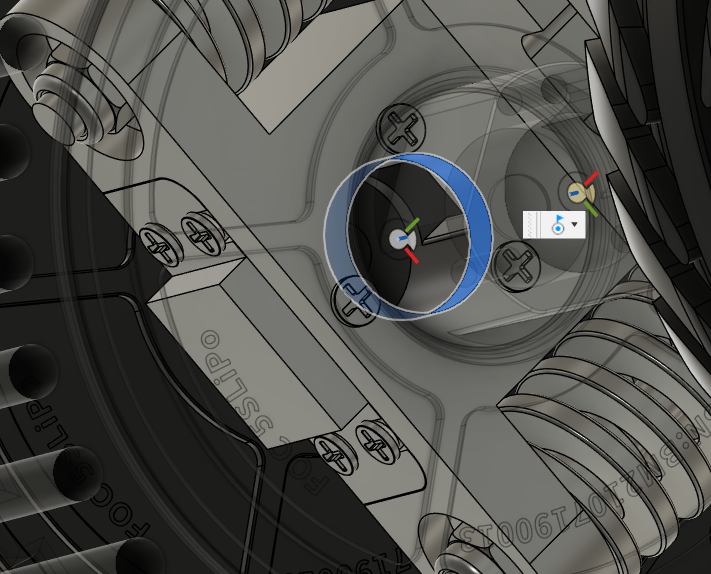
All joints need to be configured for all connection parts. For wheels, set component1 as wheel and component2 as base_link.
⚠️ When setting wheel joint-continuous, there may be reversal situations. In this case, switch the component objects as shown below:
File Structure:
Fusion2urdf
Tutorial: https://github.com/runtimerobotics/fusion360-urdf-ros2?tab=readme-ov-file#usage
Download: https://github.com/syuntoku14/fusion2urdf
Script Modifications
Need to modify the basic script to adapt to the latest version of Fusion360, mainly involving API interface updates and compatibility issues.
Export Settings
When exporting URDF, pay attention to the following key parameter settings:
- Proper configuration of material properties
- Reasonable setting of joint limits
- Optimization of collision detection meshes
- Accurate calculation of inertial parameters
ROS Integration
The exported URDF files can be used directly in ROS environment, supporting the following functions:
- Gazebo physical simulation
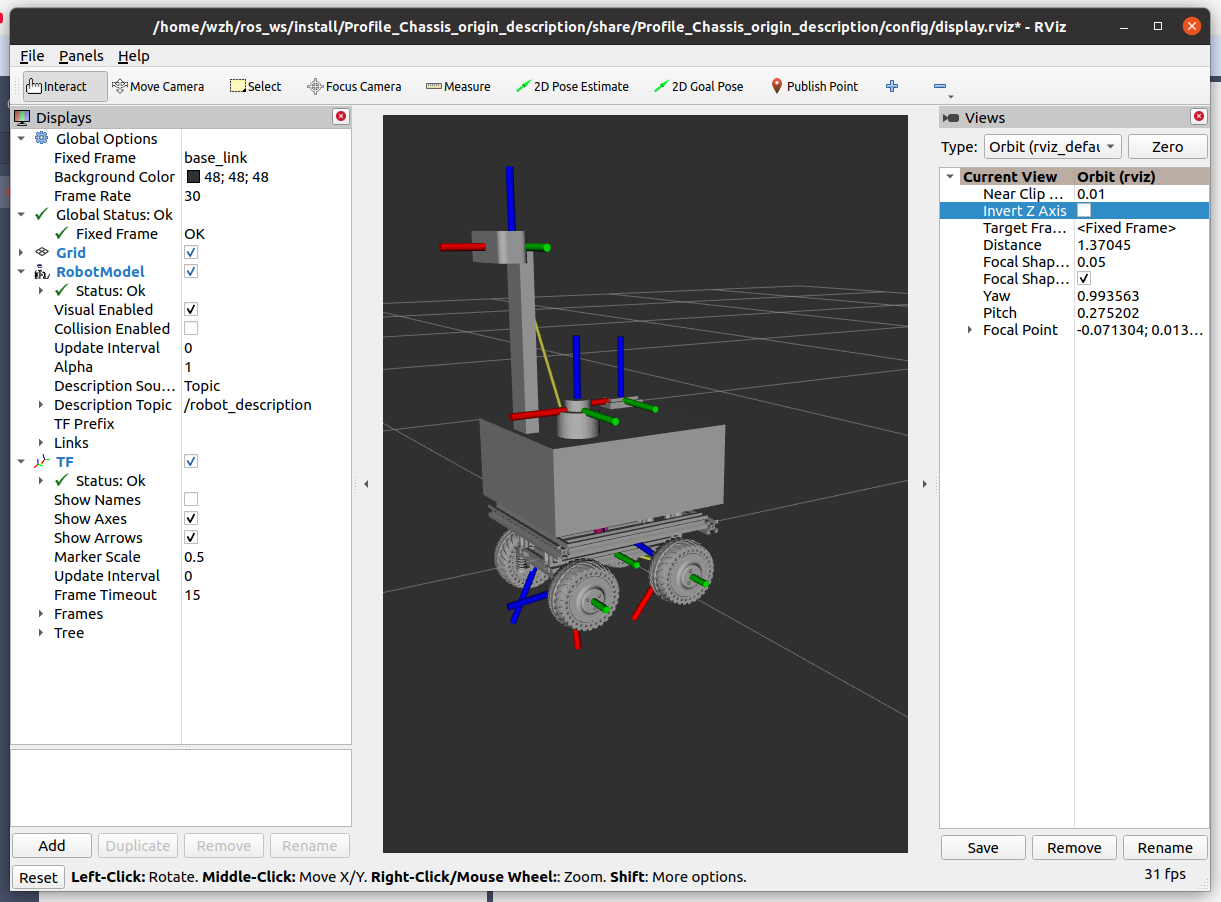
- RViz visualization display
- Navigation stack navigation
- MoveIt motion planning
Verification and Testing
Recommend the following verification before use:
# Launch URDF display in RViz
roslaunch urdf_tutorial display.launch model:=your_robot.urdf
# Monitor joint states
rostopic echo /joint_states
# Check transform between frames
rosrun tf tf_echo base_link wheel_link
Common Issues and Solutions
Joint Reversal Problem
If you find the joint movement direction is opposite to expected, you can solve it by adjusting the component order of the joint.
Collision Detection Optimization
To improve simulation efficiency, it's recommended to simplify the complexity of collision meshes while maintaining detection accuracy.
