6-DoF Occluded Target Object Grasping
TL;DR:
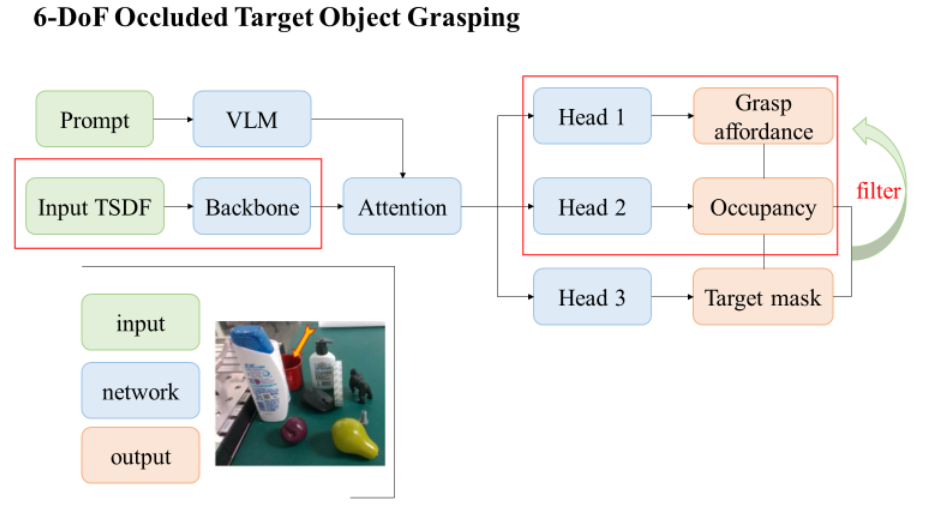
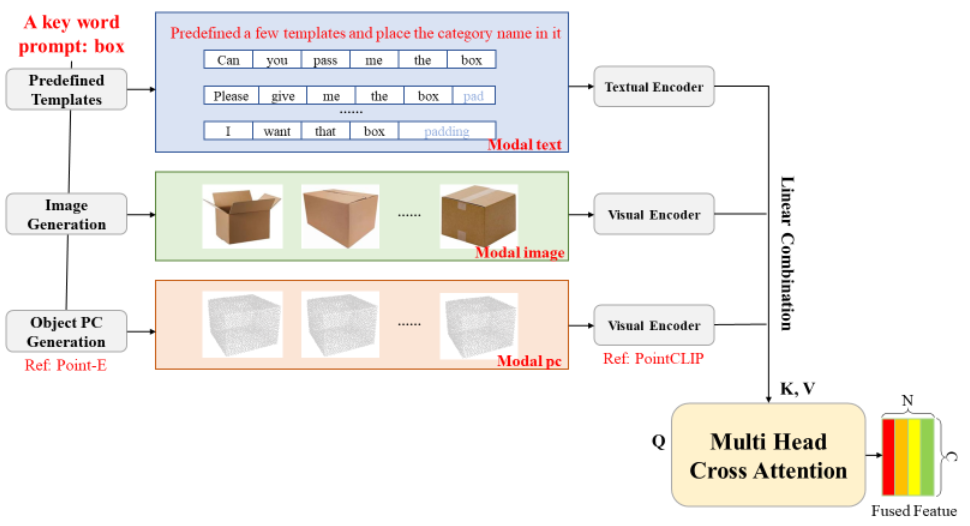
We developed a novel approach for 6-DoF grasping of occluded target objects using vision-language models (VLM) and multi-modal learning. Our system integrates textual prompts, visual perception, and point cloud data through a multi-head attention mechanism to achieve robust grasp affordance prediction and occupancy estimation. The approach combines predefined templates with modal fusion techniques, enabling precise target object identification and grasping in cluttered environments with partial occlusion scenarios.
Plasma-Propelled Blimp with Two-DOF Vector Thrusting
TL;DR:
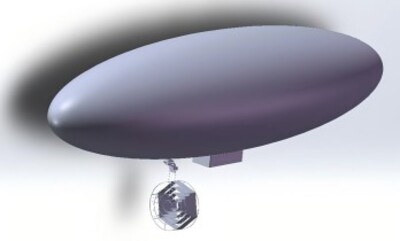
We proposed the design and control of a Plasma-propelled Ultra-silence Blimp
(PUB), a novel aerial robot employing plasma vector propulsion for ultra-quiet flight without
mechanical propellers. The system utilizes a helium-lift platform for extended endurance
and a four-layer ring asymmetric capacitor to generate ionic wind thrust. The modular
propulsion units allow flexible configuration to meet mission-specific requirements, while a
two-degree-of-freedom (DOF) head enables thrust vector control. A closed-loop slip control scheme is implemented for stable maneuvering.
Wheel-legged Robot
TL;DR:
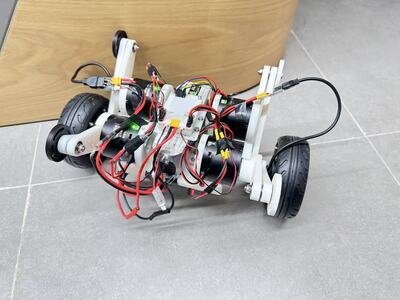
We designed a wheel-legged robot control system utilizing STM32H7 microcontroller with integrated PID and LQR algorithms for precise motion control and attitude stabilization across complex terrain. The robot combines the advantages of wheeled and legged locomotion, enabling it to navigate both smooth surfaces and rough terrain efficiently.

Auto-tracking Car
TL;DR:
We used OpenCV to rectify the camera-captured map and extract obstacle coordinates for path planning. Based on the map, we designed an efficient motion planning algorithm using A* search algorithm, enabling the car to avoid randomly positioned obstacles. Then we implemented a PID controller for precise speed and steering control, ensuring smooth navigation.

Zhi Xing Car II
TL;DR:
We designed and implemented 2D SLAM with Cartographer, enabling high-accuracy localization and mapping for navigation on NVIDIA Jetson®. We also leveraged ESDF mapping for 3D SLAM, achieving precise environmental reconstruction and optimized path planning. This project demonstrates advanced navigation capabilities in complex environments.
Zhi Xing Car I
TL;DR:
We designed and developed an autonomous navigation robot system based on ROS, supporting real-time LiDAR obstacle avoidance, SLAM mapping, and path planning. The robot integrates multiple sensors and algorithms to achieve robust autonomous navigation in indoor environments, demonstrating practical applications of robotics in real-world scenarios.
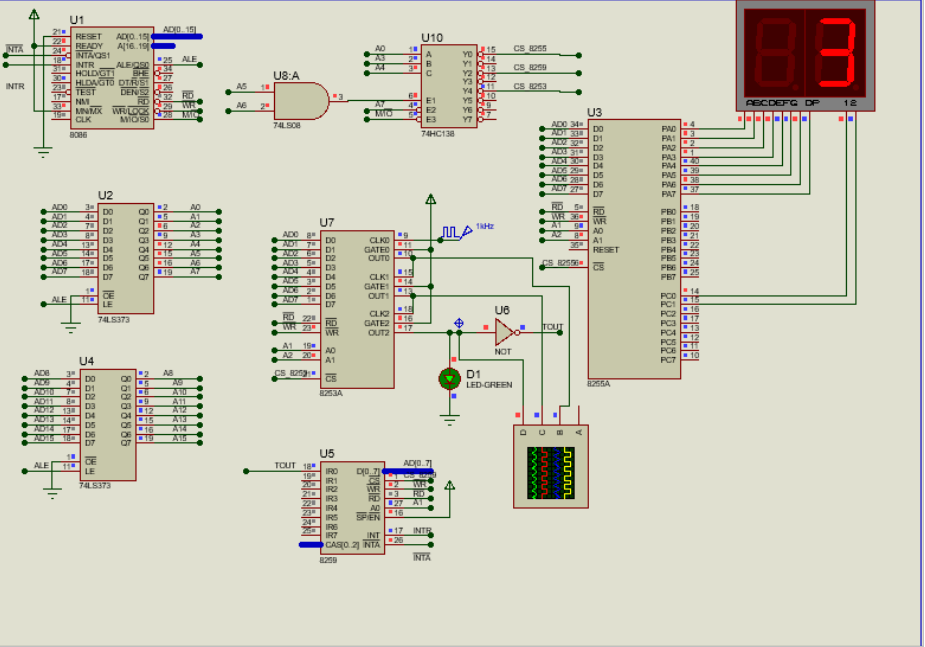
Intel 8253 Timer Simulation
TL;DR:
I used the control word register of the Intel 8253 to write control words and initial count values, enabling read/write operations on the counter, mode selection, and number system determination. This was used for real-time detection, real-time display, and data processing.


3D Building Reconstruction
TL;DR:
We developed a building fine modeling method based on point cloud segmentation and pointcloud ICP algorithm. Using handheld LiDAR scanners, we generated 3D point clouds of buildings and applied a semantic segmentation model (PointNet++) to improve accuracy and robustness in complex scenes. A geometry–semantic constrained reconstruction algorithm was further designed to restore missing structures. The method achieves efficient and high-precision 3D building models, accurately representing details such as walls, roofs, doors, and windows.