Wheel-legged Robot
Abstract
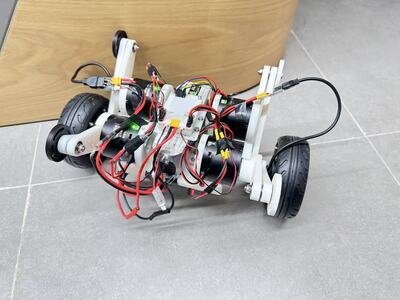
We developed a wheeled-legged balancing robot that combines the advantages of wheeled mobility and legged stability. The system features a custom-designed STM32F103 microcontroller board with embedded software implementing Linear Quadratic Regulator (LQR) and Virtual Model Control (VMC) algorithms. The robot is capable of balancing, load-carrying, and differential-drive locomotion, demonstrating robust performance in various operational scenarios. This project showcases the integration of advanced control theory with practical robotics implementation, resulting in a versatile mobile platform suitable for both research and educational purposes.Video
1. Mechanical Structure
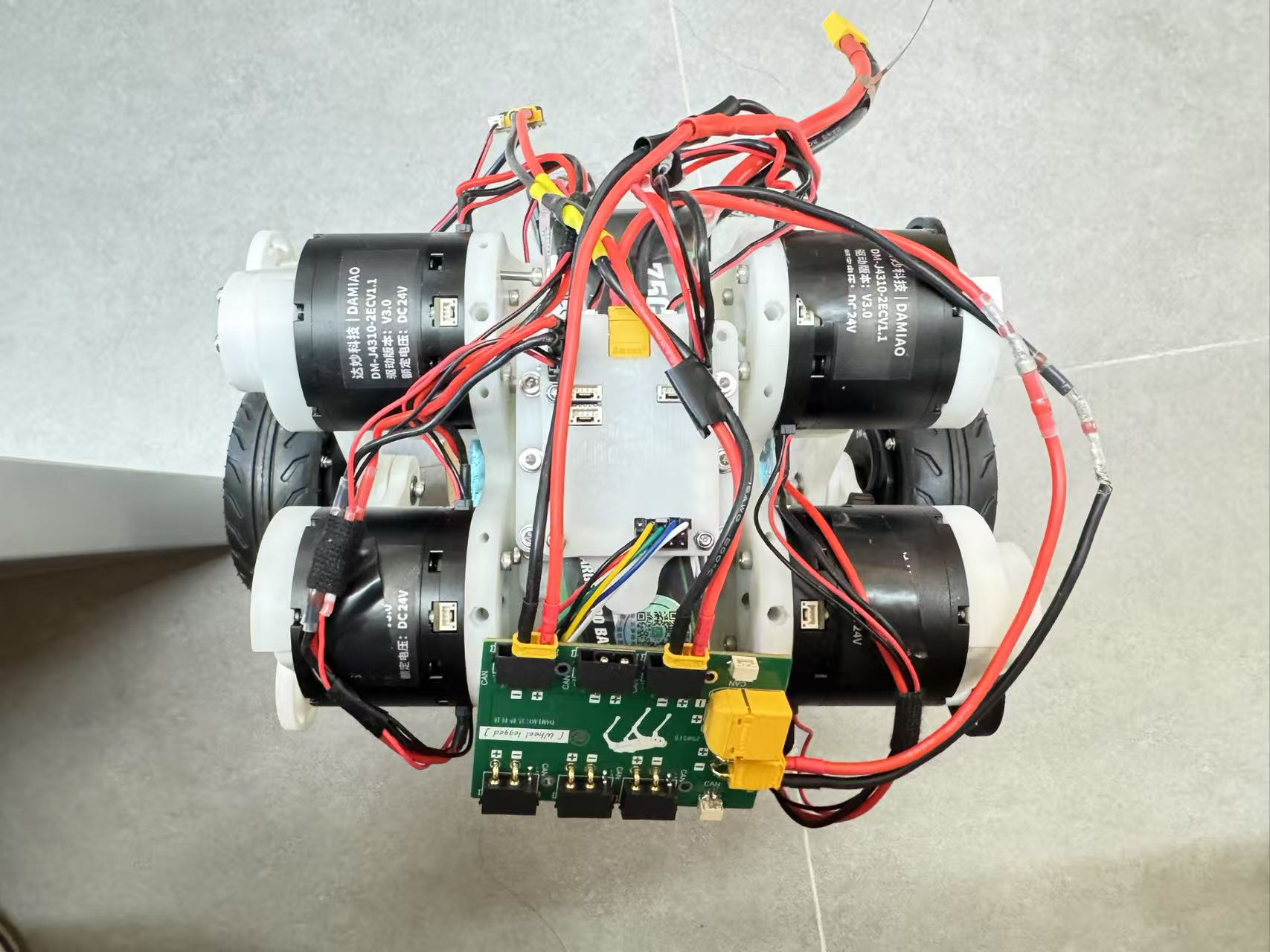
2. Electrical System
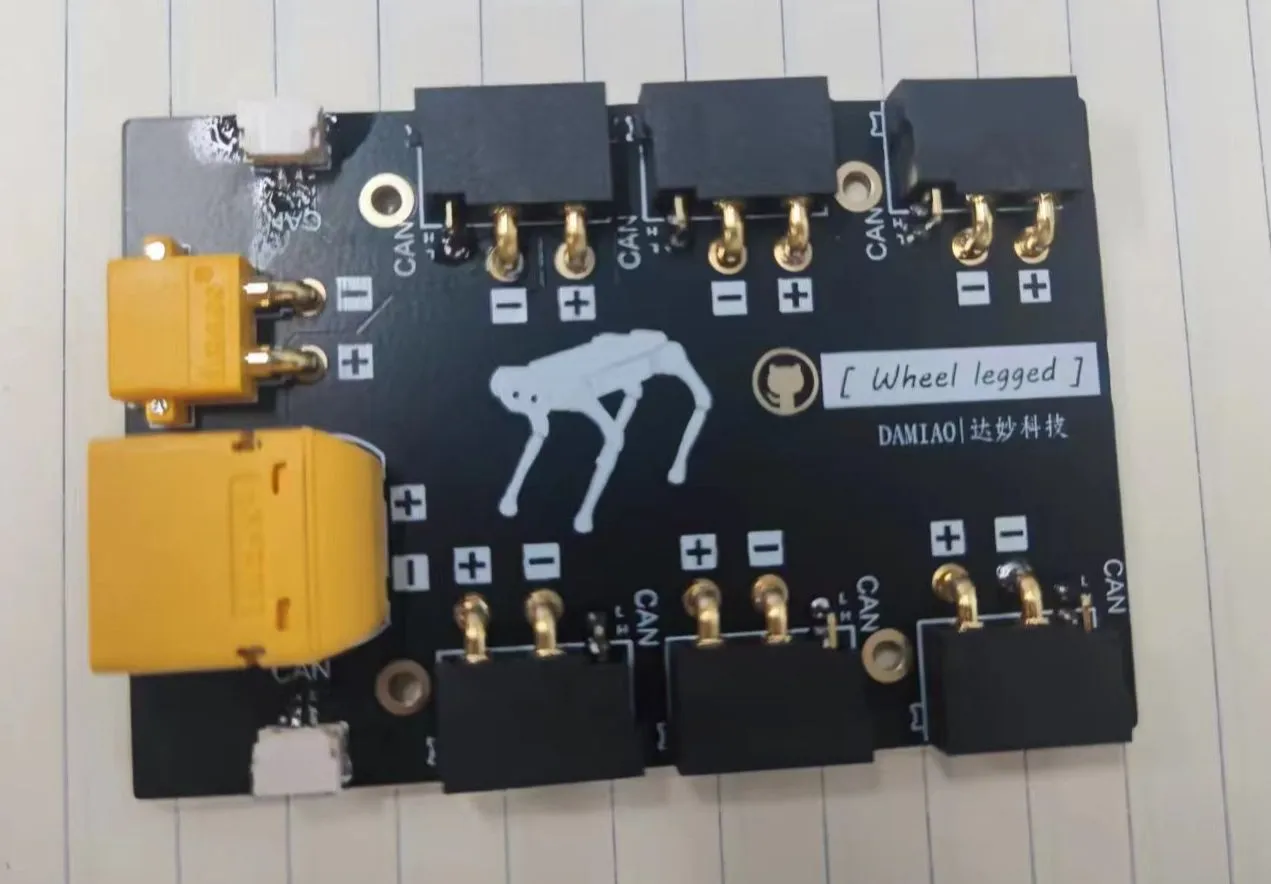
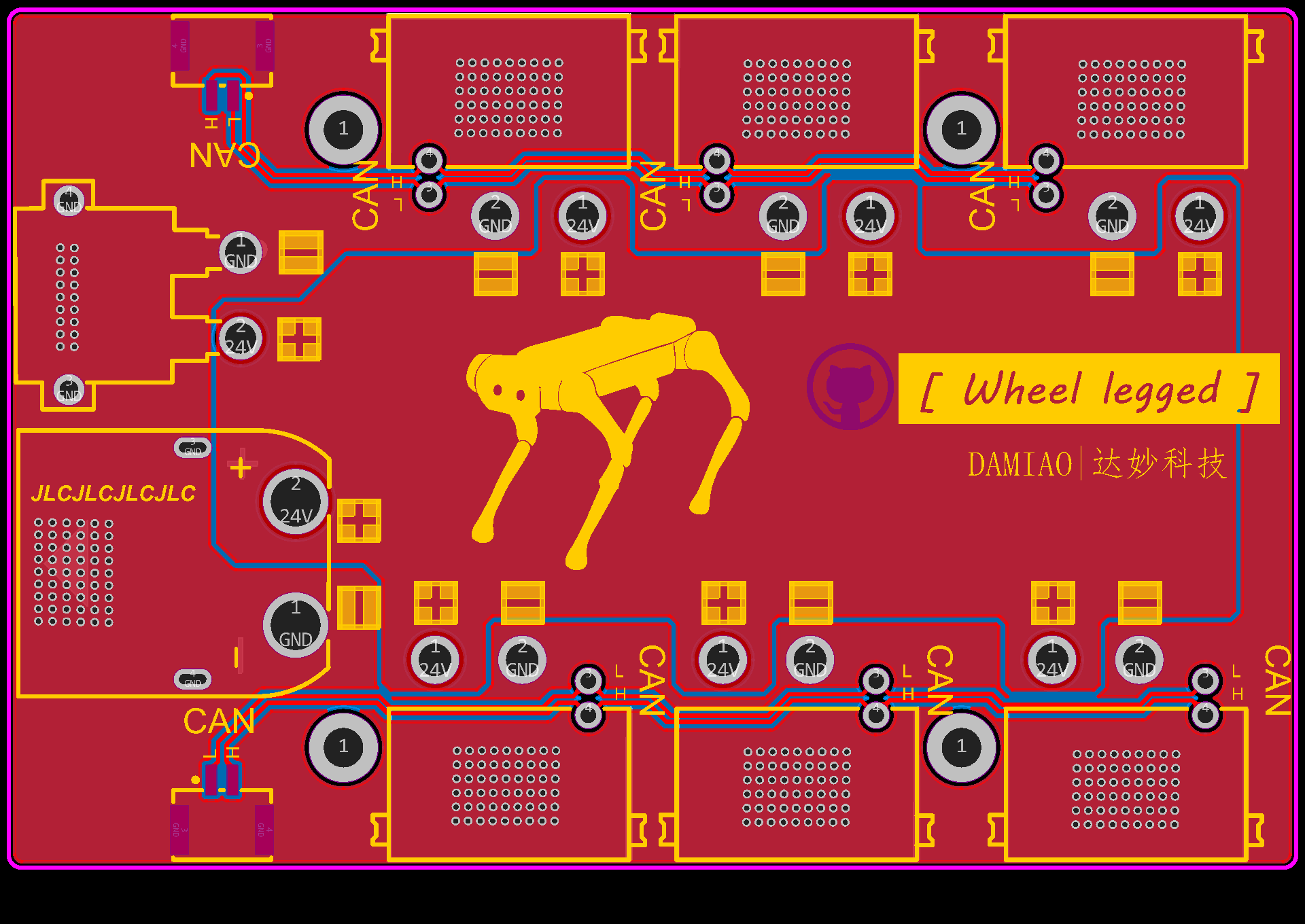
2.1 DC-DC Power Board
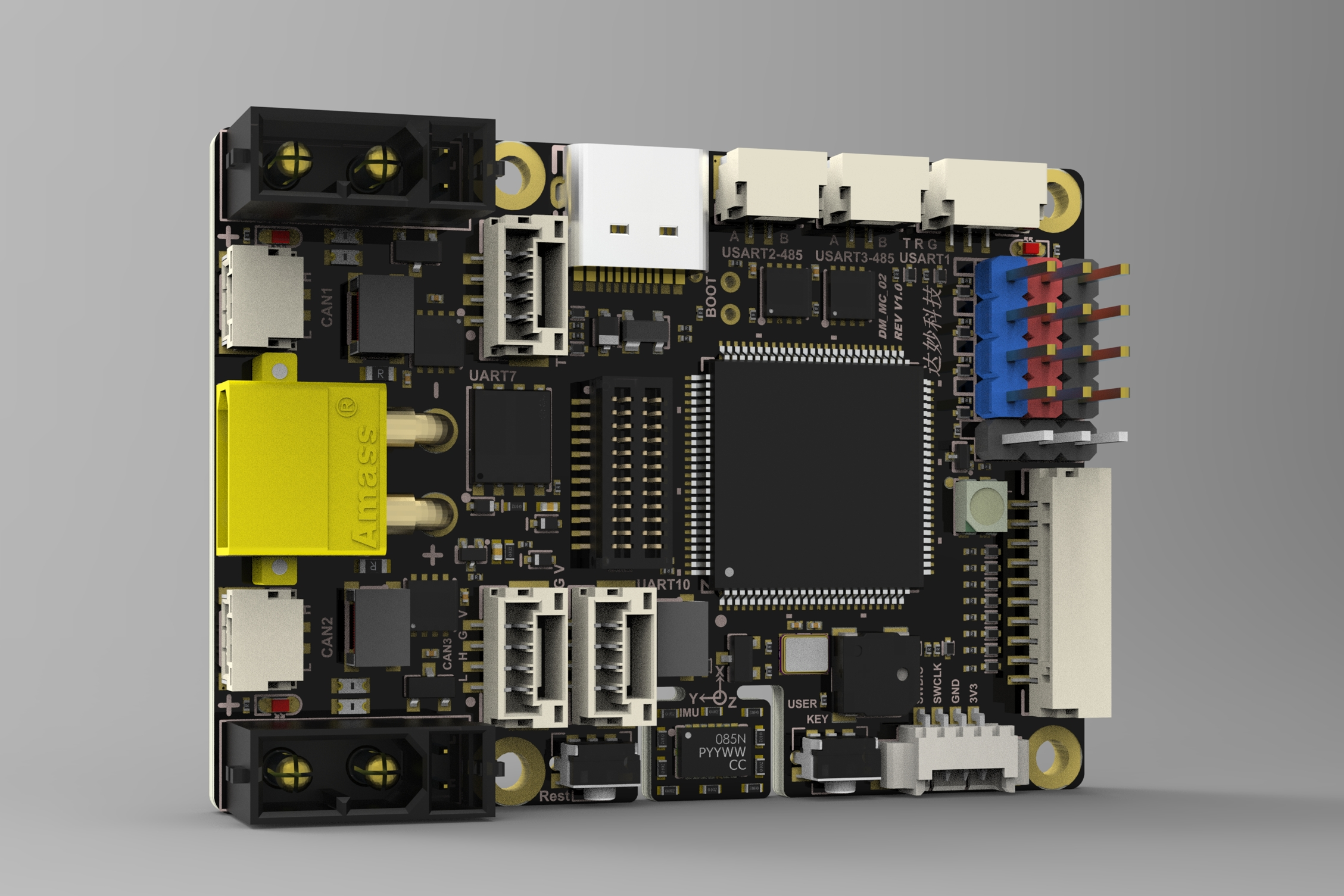
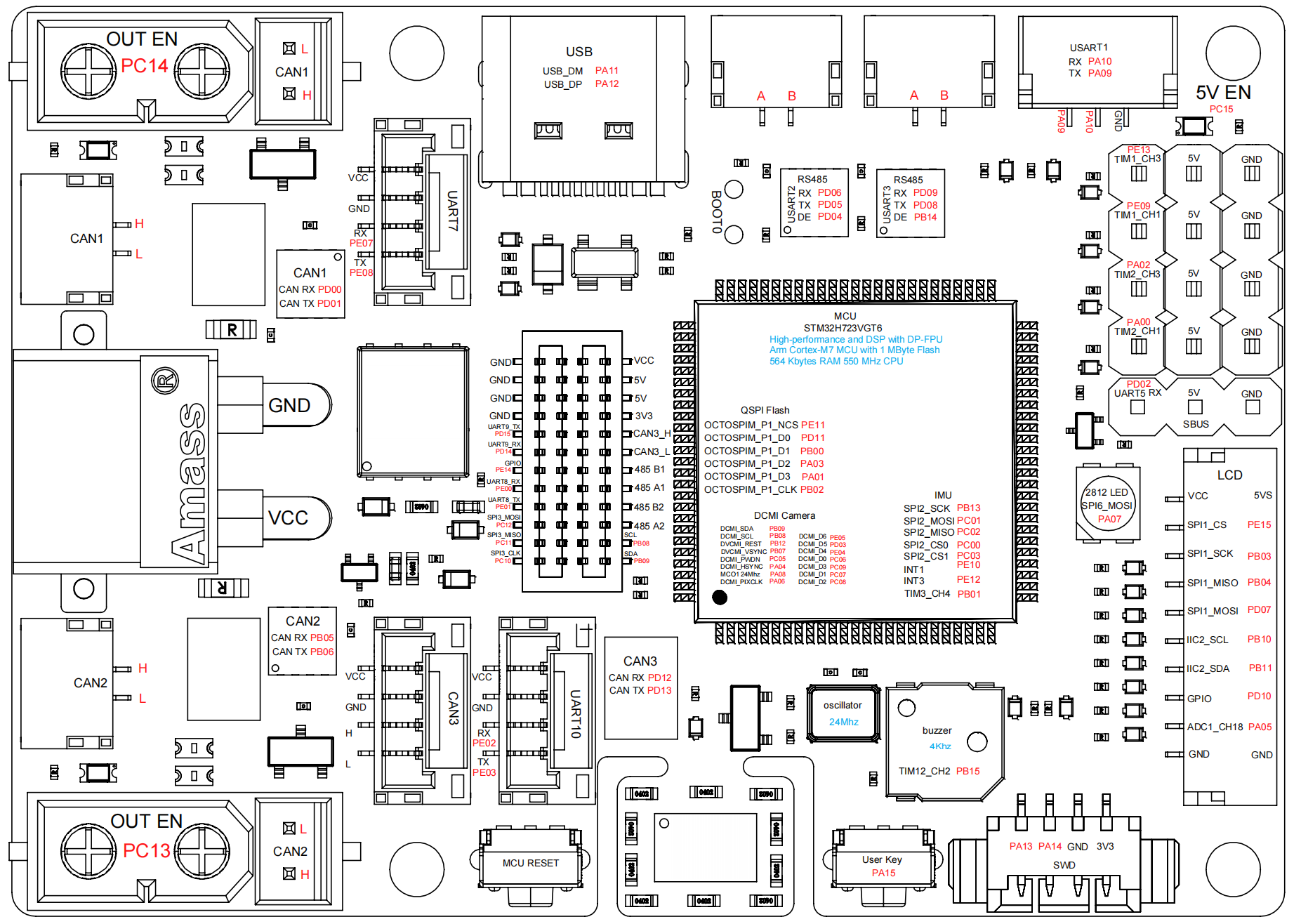
2.2 Microcontroller Board
3. Control System
[wheel_legged_model] [control_algorithm]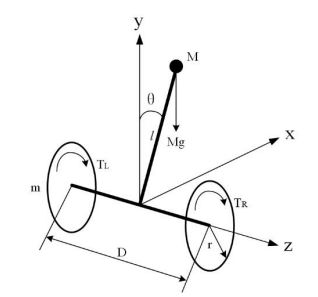
4. Simulation