Projects
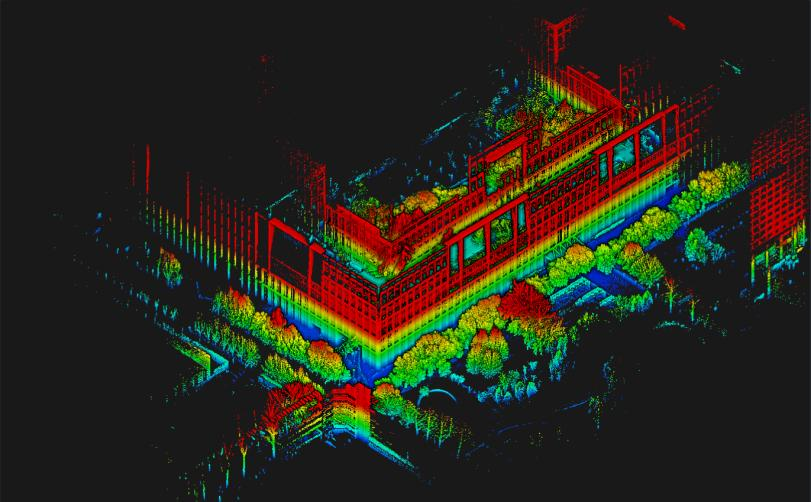
We capture building point clouds with handheld LiDAR, apply PointNet++ for semantic segmentation, and refine alignment and detail with point-cloud ICP. A geometry–semantic constrained reconstruction then restores missing structures to produce high-precision 3D building models (walls, roofs, doors, windows).
We developed an autonomous mobile car using ROS, integrating mapping, navigation, and voice interaction modules
for real-world deployment.
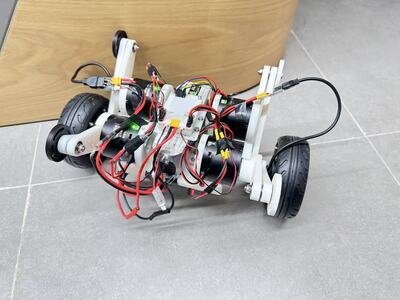
We developed a wheeled-legged balancing robot, designing a custom STM32F103 microcontroller board and embedded software, with LQR and VMC-based control, capable of balancing, load-carrying and differential-drive locomotion.